RC модель механического экскаватора - ключевые моменты конструкции
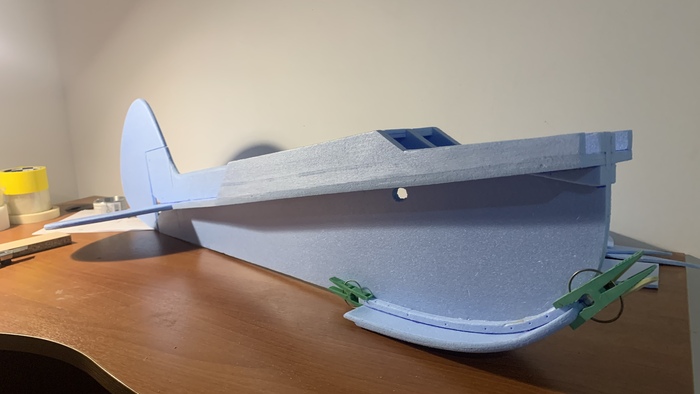
Хочу попробовать построить механический экскаватор типа такого:
Масштаб тоже как у него, 1:12, то есть, длина поворотной платформы ~400 мм
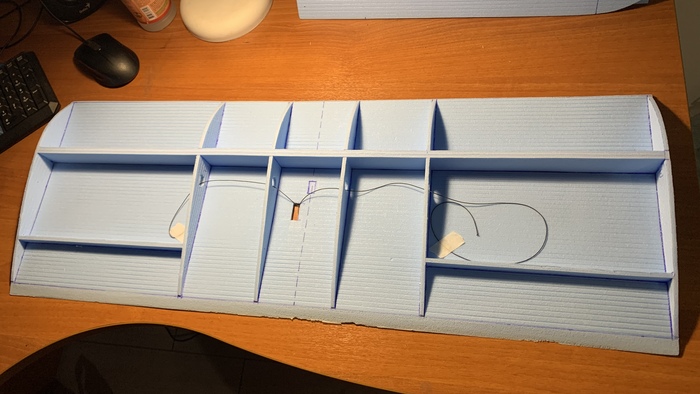
Из чего состоит такая машина - основа это лебёдка с тремя барабанами, подъёмный, тяговый и стреловой. В данном случае, с драглайном, подъёмный трос поднимает ковш, тяговый подтягивает его к экскаватору. Для максимального реализма необходимо, чтобы подъёмный и тяговый барабан имели возможность свободной размотки, чтобы можно было забрасывать ковш как спиннинг с поворота стрелы.
Как лучше всего реализовать свободную размотку на модели? Включение и выключение свободной размотки должны быть плавными и контролируемыми, как автомобильное сцепление. Обычно на такие модели ставят червячные моторедукторы, они идеальны для стреловой лебёдки и грузового каната обычных кранов, но не для экскаватора.
Реализация свободной размотки в реальной технике такова: все механизмы крутит один двигатель через сложную механическую трансмиссию, это называется групповой механический привод. Подъёмный и тяговый барабаны свободно вращаются на своих валах и имеют по фрикционной муфте и тормозу. Первая соединяет барабан с валом, тогда он вращается, по сути это сцепление. Тормоз же затормаживает барабан, не давая ему вращаться, в это время фрикционная муфта разомкнута. Для свободной размотки размыкают фрикционную муфту и отключают тормоз, тогда например забрасывается ковш драглайна. Все фрикционы ленточные
У каждого барабана получается по три состояния: 1. Включена фрикционная муфта, тормоз разомкнут, трос наматывается или принудительно разматывается; 2. Включен тормоз, фрикционная муфта разомкнута (обратное состояние) - вращение барабана невозможно; 3. Разомкнуты оба фрикциона, барабан свободно вращается на оси. В реалистичной модели необходима реализация всех трёх состояний.
Пока в голову приходит только использование шаговых моторов, с которыми всё представляется максимально простым - снятие питания есть свободная размотка. Барабан лебедки стоит прямо на валу шаговика без редуктор. И можно как угодно регулировать плавность переключения режимов. Реализуемо ли это?